[Apr. 2025]I received the Magoon Graduate Student Research Excellence Award at Purdue University (awarded to only 25 PhD students across the entire College of Engineering).
[Nov. 2024]I have passed my PhD preliminary exam and officially become a PhD candidate.
My research focuses on developing learning frameworks that enable robots to perform everyday manipulation tasks with human-level proficiency and dexterity. Toward this goal, my work spans several key areas in robot learning, including multisensory dexterity, agentic robotics, world models, and optimization for learning and control.
Contact-Grounded Policy: Dexterous Visuotactile Policy with Generative Contact Grounding Zhengtong Xu, Yeping Wang, Ben Abbatematteo, Jom Preechayasomboon, Sonny Chan, Nick Colonnese, Amirhossein H. Memar
Robotics: Science and Systems (RSS), 2026 Outstanding Paper Award & Oral Presentation, Sense of Space Workshop, CVPR 2026
@misc{xu2026cgp,
title={Contact-Grounded Policy: Dexterous Visuotactile Policy with Generative Contact Grounding},
author={Zhengtong Xu and Yeping Wang and Ben Abbatematteo and Jom Preechayasomboon and Sonny Chan and Nick Colonnese and Amirhossein H. Memar},
year={2026},
eprint={2603.05687},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.05687},
}
@misc{zhang2026rla,
title={Learning Visual Feature-Based World Models via Residual Latent Action},
author={Xinyu Zhang and Zhengtong Xu and Yutian Tao and Yeping Wang and Yu She and Abdeslam Boularias},
year={2026},
eprint={2605.07079},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2605.07079},
}
Stiffness Copilot: An Impedance Policy for Contact-Rich Teleoperation
Yeping Wang, Zhengtong Xu, Jom Preechayasomboon, Ben Abbatematteo, Amirhossein H. Memar, Nick Colonnese, Sonny Chan
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
@misc{wang2026sc,
title={Stiffness Copilot: An Impedance Policy for Contact-Rich Teleoperation},
author={Yeping Wang and Zhengtong Xu and Pornthep Preechayasomboon and Ben Abbatematteo and Amirhossein H. Memar and Nick Colonnese and Sonny Chan},
year={2026},
eprint={2603.14068},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.14068},
}
TacVLA: Contact-Aware Tactile Fusion for Robust Vision-Language-Action Manipulation
Kaidi Zhang*, Heng Zhang*, Zhengtong Xu, Zhiyuan Zhang, MD Rakibul Islam Prince, Li Xiang, Xiaojing Han, Yuhao Zhou, Arash Ajoudani, Yu She
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
@misc{zhang2026tacvla,
title={TacVLA: Contact-Aware Tactile Fusion for Robust Vision-Language-Action Manipulation},
author={Kaidi Zhang and Heng Zhang and Zhengtong Xu and Zhiyuan Zhang and Md Rakibul Islam Prince and Xiang Li and Xiaojing Han and Yuhao Zhou and Arash Ajoudani and Yu She},
year={2026},
eprint={2603.12665},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.12665},
}
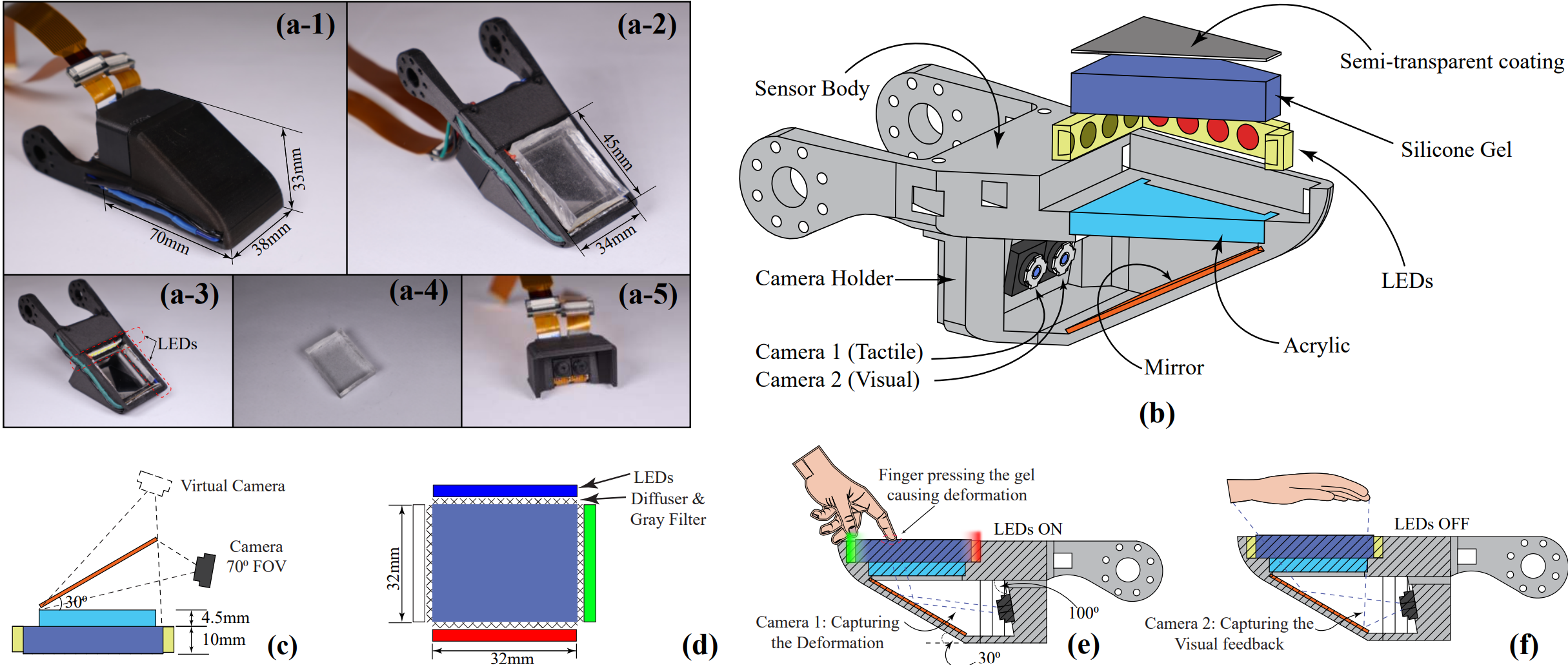
MuxGel: Simultaneous Dual-Modal Visuo-Tactile Sensing via Spatially Multiplexing and Deep Reconstruction
Zhixian Hu, Zhengtong Xu, Sheeraz Athar, Juan Wachs, Yu She
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
@misc{hu2026muxgel,
title={MuxGel: Simultaneous Dual-Modal Visuo-Tactile Sensing via Spatially Multiplexing and Deep Reconstruction},
author={Zhixian Hu and Zhengtong Xu and Sheeraz Athar and Juan Wachs and Yu She},
year={2026},
eprint={2603.09761},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.09761},
}
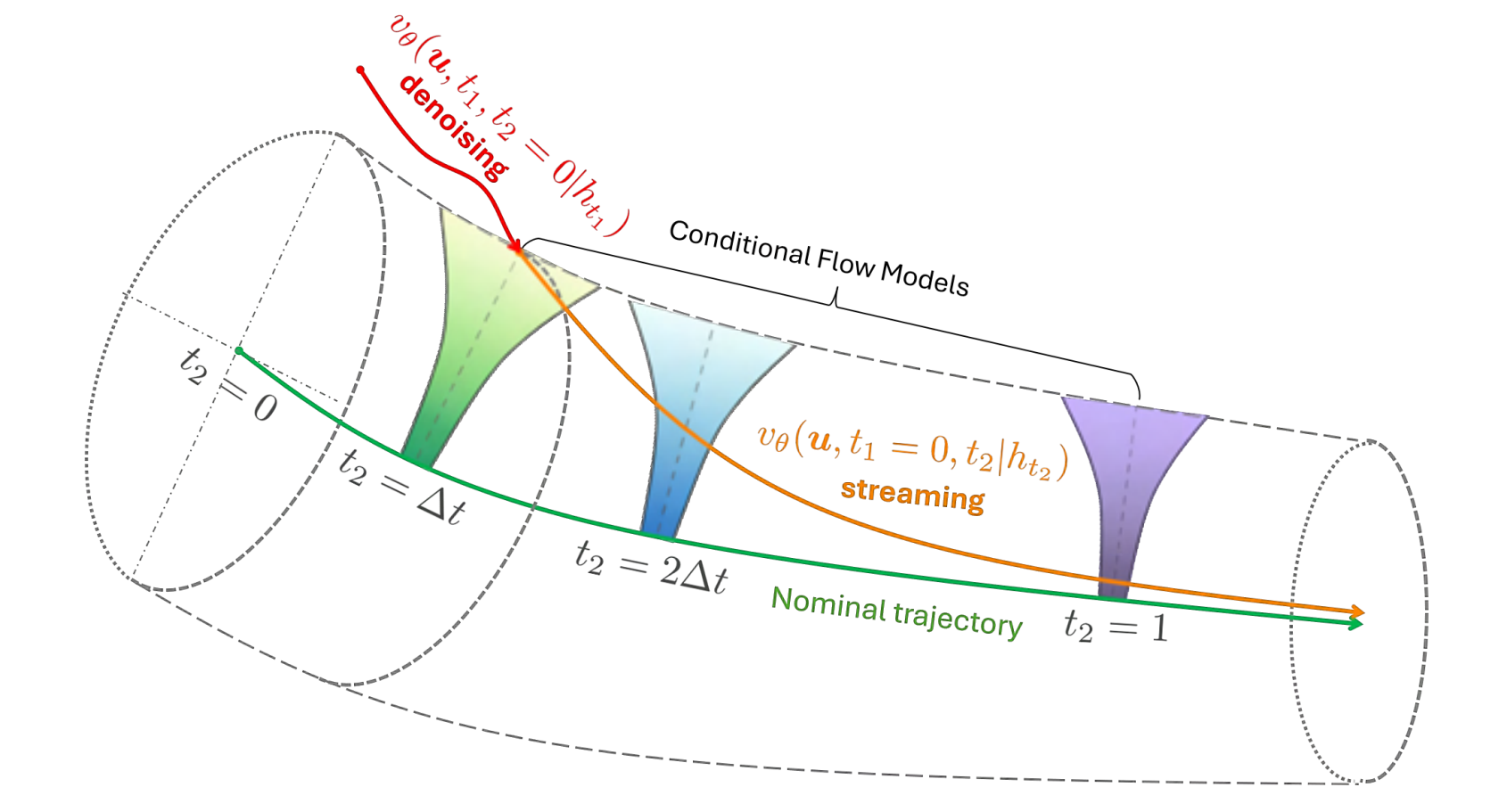
Tube Diffusion Policy: Reactive Visual-Tactile Policy Learning for Contact-rich Manipulation
Teng Xue, Alberto Rigo, Bingjian Huang, Jiayi Shen, Zhengtong Xu, Nick Colonnese, Amirhossein H. Memar
Under Review, 2026
@misc{xue2026tdp,
title={Tube Diffusion Policy: Reactive Visual-Tactile Policy Learning for Contact-rich Manipulation},
author={Teng Xue and Alberto Rigo and Bingjian Huang and Jiayi Shen and Zhengtong Xu and Nick Colonnese and Amirhossein H. Memar},
year={2026},
eprint={2604.23609},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.23609},
}
@misc{guo2026planar,
title={PLanAR: Planning-Language-Grounded Agentic Reasoning for Robot Manipulation},
author={Pengyuan Guo and Zhonghao Mai and Zhengtong Xu and Kaidi Zhang and Quan Luu and Heng Zhang and Zichen Miao and Arash Ajoudani and Zachary Kingston and Qiang Qiu and Yu She},
year={2026},
eprint={2602.01662},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2602.01662},
}
ManiFeel: Benchmarking and Understanding Visuotactile Manipulation Policy Learning
Quan Khanh Luu*, Pokuang Zhou*, Zhengtong Xu*, Zhiyuan Zhang, Qiang Qiu, Yu She
Under Review, 2026 Oral Presentation, New England Manipulation Symposium 2025 Best Paper Award & Oral Presentation, Sense of Space Workshop, CVPR 2026
Canonical Policy: Learning Canonical 3D Representation for SE(3)-Equivariant Policy
Zhiyuan Zhang*, Zhengtong Xu*, Jai Nanda Lakamsani, Yu She
IEEE Transactions on Robotics (T-RO), 2026
@misc{zhang2025canonical,
title={Canonical Policy: Learning Canonical 3D Representation for SE(3)-Equivariant Policy},
author={Zhiyuan Zhang and Zhengtong Xu and Jai Nanda Lakamsani and Yu She},
year={2025},
eprint={2505.18474},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2505.18474},
}
UniT: Data Efficient Tactile Representation with Generalization to Unseen Objects Zhengtong Xu, Raghava Uppuluri, Xinwei Zhang, Cael Fitch, Philip Glen Crandall, Wan Shou, Dongyi Wang, Yu She
IEEE Robotics and Automation Letters (RA-L), 2025
@misc{xu2025unit,
title={{UniT}: Data Efficient Tactile Representation with Generalization to Unseen Objects},
author={Zhengtong Xu and Raghava Uppuluri and Xinwei Zhang and Cael Fitch and Philip Glen Crandall and Wan Shou and Dongyi Wang and Yu She},
year={2025},
eprint={2408.06481},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2408.06481},
}
Safe Human-Robot Collaboration with Risk-tunable Control Barrier Functions
Vipul K. Sharma*, Pokuang Zhou*, Zhengtong Xu*, Yu She, S. Sivaranjani
IEEE/ASME Transactions on Mechatronics (TMECH), 2025
@ARTICLE{xu2025rtcbf,
author={Sharma, Vipul K. and Zhou, Pokuang and Xu, Zhengtong and She, Yu and Sivaranjani, S.},
journal={IEEE/ASME Transactions on Mechatronics},
title={Safe Human–Robot Collaboration With Risk Tunable Control Barrier Functions},
year={2025},
doi={10.1109/TMECH.2025.3572047}}
@article{xu2024letac,
author={Xu, Zhengtong and She, Yu},
journal={IEEE Transactions on Robotics},
title={{LeTac-MPC}: Learning Model Predictive Control for Tactile-Reactive Grasping},
year={2024},
volume={40},
number={},
pages={4376-4395},
doi={10.1109/TRO.2024.3463470}
}
@article{athar2023vistac,
title={Vistac towards a unified multi-modal sensing finger for robotic manipulation},
author={Athar, Sheeraz and Patel, Gaurav and Xu, Zhengtong and Qiu, Qiang and She, Yu},
journal={IEEE Sensors Journal},
year={2023},
publisher={IEEE}
}
Topic: Multimodal (Tactile and 3D Vision) Robot Perception Learning
Awards
Bilsland Dissertation Fellowship, Purdue University, 2026 (valued at $62,513.22, supporting final year of PhD studies)
Magoon Graduate Student Research Excellence Award, Purdue University, 2025 (awarded to only 25 PhD students across the entire Purdue College of Engineering)
Dr. Theodore J. and Isabel M. Williams Fellowship, Purdue University, 2022
National Scholarship, Ministry of Education of China, 2017
Reviewer Service
Conference on Robot Learning (CoRL)
IEEE Robotics and Automation Letters (RA-L)
IEEE Transactions on Robotics (T-RO)
IEEE International Conference on Robotics and Automation (ICRA)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Teaching
Vertically Integrated Projects (VIP)-GE Robotics and Autonomous Systems, Grad Mentor, Spring 2024/Fall 2023/Summer 2023
IE 474-Industrial Control Systems, Teaching Assistant, Fall 2022